

Mathematical Model Of Induction Motor Pdf
Open access peer-reviewed chapter
Mathematical Model of the Three-Phase Induction Machine for the Study of Steady-State and Transient Duty Under Balanced and Unbalanced States
By Alecsandru Simion, Leonard Livadaru and Adrian Munteanu
Submitted: June 14th 2011 Reviewed: May 20th 2012 Published: November 14th 2012
DOI: 10.5772/49983
1. Introduction
A proper study of the induction machine operation, especially when it comes to transients and unbalanced duties, requires effective mathematical models above all. The mathematical model of an electric machine represents all the equations that describe the relationships between electromagnetic torque and the main electrical and mechanical quantities.
The theory of electrical machines, and particularly of induction machine, has mathematical models with
The mathematical models with concentrated parameters are the most popular and consequently employed both in scientific literature and practice. The equations stand on resistances and inductances, which can be used further for defining magnetic fluxes, electromagnetic torque, and et.al. These models offer results, which are globally acceptable but cannot detect important information concerning local effects (Ahmad, 2010; Chiasson, 2005; Krause et al., 2002; Ong, 1998; Sul, 2011).
The family of mathematical models with concentrated parameters comprises different approaches but two of them are more popular:
The first category works with the real machine. The equations include, among other parameters, the mutual stator-rotor inductances with variable values according to the rotor position. As consequence, the model becomes non-linear and complicates the study of dynamic processes (Bose, 2006; Marino et al., 2010; Wach, 2011).
The orthogonal (dq) model has begun with Park's theory nine decades ago. These models use parameters that are often independent to rotor position. The result is a significant simplification of the calculus, which became more convenient with the defining of the
Starting with the ″classic″ theory we deduce in this contribution a mathematical model that exclude the presence of the currents and angular velocity in voltage equations and uses total fluxes alone. Based on this approach, we take into discussion two control strategies of induction motor by principle of constant total flux of the stator and rotor, respectively.
The most consistent part of this work is dedicated to the study of unbalanced duties generated by supply asymmetries. It is presented a comparative analysis, which confronts a balanced duty with two unbalanced duties of different unbalance degrees. The study uses as working tool the Matlab-Simulink environment and provides variation characteristics of the electric, magnetic and mechanical quantities under transient operation.
Advertisement
2. The equations of the three-phase induction machine in phase coordinates
The structure of the analyzed induction machine contains: 3 identical phase windings placed on the stator in an 120 electric degrees angle of phase difference configuration; 3 identical phase windings placed on the rotor with a similar difference of phase; a constant air-gap (close slots in an ideal approach); an unsaturated (linear) magnetic circuit that allow to each winding to be characterized by a main and a leakage inductance. Each phase winding has
The voltage equations that describe the 3+3 circuits are:
E1
E2
In a matrix form, the equations become:
E3
E4

Figure 1.
Schematic model of three-phase induction machine: a. real; b. reduced rotor
The quantities in brackets represent the matrices of voltages, currents, resistances and total flux linkages for the stator and rotor. Obviously, the total fluxes include both main and mutual components. Further, we define the self-phase inductances, which have a leakage and a main component: Ljj=Lσs+Lhs for stator and LJJ=LΣR+LHR for rotor. The mutual inductances of two phases placed on the same part (stator or rotor) have negative values, which are equal to half of the maximum mutual inductances and with the main self-phase component: Mjk=Ljk=Lhj=Lhk. The expressions in matrix form are:
E5
E6
E7
where
The analysis of the induction machine usually reduces the rotor circuit to the stator one. This operation requires the alteration of the rotor quantities with the coefficient k=Ws/WR by complying with the conservation rules. The new values are:
E8
E9
E10
where the reluctances of the flux paths have been used. The new matrices, with rotor quantities denoted with lowercase letters are:
E11
E12
By virtue of these transformations, the voltage equations become:
E13
By using the notations:
E14
and after the separation of the currents derivatives, (8) can be written under operational form as follows:
E15
E16
E17
Besides (10), the equations concerning mechanical quantities must be added. To this end, the electromagnetic torque has to be calculated. To this effect, we start from the coenergy expression,
E18
The magnetic energy of the stator and the rotor does not depend on the rotation angle and consequently, for the electromagnetic torque calculus nothing but the last term of (11) is used. One obtains:
E19
The equation of torque equilibrium can now be written under operational form as:
E20
where ωR represents the
The simulation of the induction machine operation in Matlab-Simulink environment on the basis of the above equations system is rather complicated. Moreover, since all equations depend on the angular speed than the precision of the results could be questionable mainly for the study of rapid transients. Consequently, the use of other variables is understandable. Further, we shall use the
It is well known that the total fluxes have a self-component and a mutual one. Taking into consideration the rules of reducing the rotor circuit to the stator one, the matrix of inductances can be written as follows:
E22
Now, the equation system (8) can be written shortly as:
E23
By using the multiplication with the reciprocal matrix:
E24
than (15) becomes:
This is an expression that connects the voltages to the total fluxes with no currents involvement. Now, practically the reciprocal matrix must be found. To this effect, we suppose that the reciprocal matrix has a similar form with the direct matrix. If we use the condition:
E26
where the following notations have been used:
E27
Further, the matrix product is calculated:
E28
E29
E30
E31
E32
E33
For the calculation of the
E34
To demonstrate the validity of (21), one uses the expression of the matrix
E35
where the following notation has been used:
E36
This expression defines the permeance of a three-phase machine for the mathematical model in total fluxes.
E37
A more convenient expression that depends on sinθR and cosθR, leads to the electromagnetic torque equation
E38
Ultimately, by getting together the equations of the 6 electric circuits and the movement equations we obtain an 8 equation system, which can be written under operational form:
E39
E40
E41
E42
E43
E44
E45
This equation system, (26-1)-(26-8) allows the study of any operation duty of the three-phase induction machine: steady state or transients under balanced or unbalanced condition, with simple or double feeding.
Advertisement
3. Mathematical models used for the study of steady-state under balanced and unbalanced conditions
Generally, the symmetrical three-phase squirrel cage induction machine has the stator windings connected to a supply system, which provides variable voltages according to certain laws but have the same pulsation. Practically, this is the case with 4 wires connection, 3 phases and the neutral. The sum of the phase currents gives the current along neutral and the homopolar component can be immediately defined. The analysis of such a machine can use the symmetric components theory. This is the case of the machine with
The vast majority of electric drives uses however the 3 wires connection (no neutral). Consequently, there is no homopolar current component, the homopolar fluxes are zero as well and the sum of the 3 phase total fluxes is null. This is an asymmetric condition with
3.1. The abc-αβ0 model in total fluxes
The operation of the machine with 2 unbalances can be analyzed by considering certain expressions for the instantaneous values of the stator and rotor quantities (voltages, total fluxes and currents eventually, which can be transformed from (a, b, c) to (α, β, 0) reference frames in accordance with the following procedure :
E47
We define the following notations:
E48
E49
E50
E51
By using these notations in (17) and after convenient groupings we obtain:
E52
E53
E54
E55
E56
E57
Typical for the cage machine or even for the wound rotor after the starting rheostat is short-circuited is the fact that the
Further, the movement equation has to be attached. It is necessary to establish the detailed expression of the electromagnetic torque in
E58
Ultimately, the 8 equation system under operational form is:
E59
E60
E61
E62
E63
E64
E65
These equations allow the study of three-phase induction machine for any duty. It has to be mentioned that the electromagnetic torque expression has no homopolar components of the total fluxes.
3.2. The abc-dq model in total fluxes
For the study of the single unbalance condition is necessary to consider expressions of the instantaneous values of the stator and rotor quantities (voltages, total fluxes and eventually currents in
Further, the movement equation (31) must be attached. The operational form of the equation system (4 electric circuits and 2 movement equations) is:
E67
E68
E69
E70
E71
The equation sets (33-1...4) and (34-1...6) prove that a three-phase induction machine connected to the supply system by 3 wires can be studied similarly to a two-phase machine (

Figure 2.
Induction machine schematic view: a.Two-phase model; b. Simplified view of the total fluxes in stator reference frame; c. Idem, but in rotor reference frame
The windings of two-phase model are denoted with (
-
projection sums corresponding to rotor flux linkages from (
αr, βr ) axes along the two stator axes (denoted withx andy that isψ xr , ψ yr ) when they refer to the flux linkages from the right member of the first two equations, Fig. 2b. -
projection sums corresponding to stator flux linkages from (
αs, βs ) axes along the two rotor axes (denoted withX andY that isψ XS , ψ YS ) when they refer to the flux linkages from the last two equations, Fig. 2c.
E73
Some aspects have to be pointed out. When the machine operates under motoring duty, the pulsation of the stator flux linkages from (
E74
E75
The first two equations join the quantities with the pulsation
E78
or a second equivalent expression:
E79
which shows the ″total symmetry″ of the two-phase model of the three-phase machine regarding both stator and rotor. The equations of the four circuits together with the movement equation (37) under operational form give:
E80
E81
E84
This last equation system allows the study of transients under single unbalance condition. It is similar with the frequently used equations (Park) but contains as variables only total fluxes and the rotation angle. There are no currents or angular speed in the voltage equations.
Advertisement
4. Expressions of electromagnetic torque
For the steady state analysis of the symmetric three-phase induction machine, one can define the simplified space phasor of the stator flux, which is collinear to the total flux of the (
E86
E87
When the speed regulation of the cage induction machine is employed by means of voltage and/or frequency variation then the simultaneous control of the two total flux space vectors is difficult. As consequence, new strategies more convenient can be chosen. To this effect, we shall deduce expressions of the electromagnetic torque that include only one of the total flux space vectors either from stator or rotor.
4.1. Variation of the torque with the stator total flux space vector
One of the methods used for the control of induction machine consists in the operation with
E88
where
The expression of the magnetic torque that depends with the stator total flux space vector becomes:
E89
Assuming the ideal hypothesis of maintaining constant the stator flux, for example equal to the no-load value, then the pull-out torque, Temax, corresponds to sin2θ = 1 that is:
E90
Now an observation can be formulated. Let us suppose an ideal static converter that operates with a U

Figure 3.
Mechanical characteristics,

Figure 4.
Resultant stator voltage vs. pulsatance
A proper control of the induction machine requires a strategy based on
From (40) we can deduce:
E91
and further:
E92
if the term
-
Constant maintaining of the stator flux for
low pulsations (that is low angular velocity values including start-up) can be obtained with a significant increase of the supply voltage. The ″additional″ increasing of the voltage depends proportionally on the load value. Analytically, this fact is caused by the predominance of the term G against F, (45). From the viewpoint of physical phenomena, a higher voltage in case of severe start-up or low frequency operation is necessary for the compensation of the leakage fluxes after which the stator flux must keep its prescribed value. -
Constant maintaining of the stator flux for
high pulsations (that is angular speeds close or even over the rated value) requires an insignificant rise of the supply voltage. TheU/f ratio is close to its rated value (rated values ofU andf ) especially for low load torque values. However, a certain increase of the voltage is required proportionally with the load degree. Analytically, this fact is now caused by the predominance of the term F against G, (45). -
In conclusion, the resultant stator flux remain constant for
U/f =constant=k 1 strategy if the load torque is small. For high loads (especially if the operation is close to the pull-out point), the maintaining of the stator flux requires an increase of theU/f ratio, which means a significant rise of the voltage and current.
If the machine parameters are established, then a variation rule of the supply voltage can be settled in order to have a constant stator flux (equal, for example, to its no-load value) both for frequency and load variation.
Fig. 4 presents (for a machine with predetermined parameters: supply voltage with the amplitude of 490 V (Uas=346.5V); Rs=Rr=2; Lhs=0,09; Lσs= Lσr=0,01; J=0,05; p=2; kz=0,02; ω1=314,1 (SI units)) the variation of the resultant stator voltage with the pulsatance (in per unit description) for three constant slip values. The variation is a straight line for reduced loads and has a certain inflection for low frequency values (a few Hz). For under-load operation, a significant increase of the voltage with the frequency is necessary. This fact is more visible at high slip values, close to pull-out value (in our example the pull-out slip is of 0,33).
The variation rule based on
4.2. Variation of the torque with the rotor total flux space vector
Usually, the electric drives that demand high value starting torque use
E93
and the expression of the electromagnetic torque on the basis of rotor flux alone becomes:
E94
Assuming the ideal hypothesis of maintaining constant the rotor flux, for example equal to the no-load value, then the electromagnetic torque expression is:
E95
where the voltage and pulsation is supposed to have rated values. Taking into discussion a machine with predetermined parameters (supply voltage with the amplitude of 490 V (Uas=346.5V); Rs=Rr=2; Lhs=0,09; Lσs= Lσr=0,01; J=0,05; p=2; kz=0,02; ω1=314,1 (SI units)) then the expression of the mechanical characteristic is:
E96
which is a straight line, A1 in Fig. 5. The two intersection points with the axes correspond to synchronism (Te=0, ΩR=ωs/2=157) and start-up (Te=995 Nm, ΩR=0) respectively.
The pull-out torque is extremely high and acts at start-up. This behavior is caused by the hypothesis of maintaing constant the rotor flux at a value that corresponds to no-load operation (when the rotor reaction is null) no matter the load is. The compensation of the magnetic reaction of the rotor under load is
Another unreasonable possibility is the maintaining of the rotor flux to a value that corresponds to start-up (
E97
The supply of the stator winding with constant voltage and rated pulsation determines a variation of the resultant rotor flux within the short-circuit value (ΨrRk=0,5Wb) and the synchronism value (ΨrR0=1,78Wb). The operation points lie between the two lines, A1 and A2, on a position that depends on the load torque. When the supply pulsation is two times smaller (and the voltage itself is two times smaller as well) and the resultant rotor flux is maintained constant to the value ΨrR0=1,78Wb, then the mechanical characteristic is described by the straight line B1, which is parallel to the line A1. Similarly, for ΨrRk=0,5Wb, the mechanical characteristic become the line B2, which is parallel to A2.

Figure 5.
Mechanical characteristics

Figure 6.
Resultant stator voltage vs. pulsatance,
When the applied voltage and pulsation are two times smaller regarding the rated values then the operation points lie between B1 and B2 since the rotor flux varies within ΨrRk=0,5Wb (short-circuit) and ΨrR0=1,78Wb (synchronism).
The control based on constant rotor flux strategy ensures parallel mechanical characteristics. This is an important advantage since the induction machine behaves like shunt D.C. motor. A second aspect is also favorable in the behavior under this strategy. The mechanical characteristic has no sector of unstable operation as the usual induction machine has.
The modification of the flux value (generally with decrease) leads to a different slope of the characteristics, which means a significant decrease of the torque for a certain angular speed.
The question is ″what variation rule of
E98
E99
.
Fig. 6 presents the variation of the stator voltage with pulsatance at constant resultant rotor flux (1,3 Wb), which are called the
When the pulsation of the stator voltage is low (small angular velocities) then the torque that has to be overcame is small too, but it will rise with the speed and the frequency along a parabolic variation. Since the upper limit of the torque is given by the limited power of the machine (thermal considerations) then this strategy requires additional precautions as concern the safety devices that protect both the static converter and the supply source itself.
The analysis of the square root term from (51) generates similar remarks as in the above discussed control strategy.
Finally is important to say that a control characteristic must be prescribed for the static converter. This characteristic should be simplified and generally reduced to a straight line placed between the curves 1 and 2 from Fig. 6.
Advertisement
5. Study of the unbalanced duties
The unbalanced duties (generated by supply asymmetries) are generally analyzed by using the theory of symmetric components, according to which any asymmetric three-phase system with
-
When the amplitudes of the phase voltages are different and/or the angles of phase difference are not equal to 2π/3 then the
unbalanced three-phase system can be replaced with an equivalentunbalanced two-phase system, which further is taken apart in two systems, one ofdirect sequence with higher two-phase amplitude voltages and the other ofinverse sequence with lower two-phase amplitude voltages. Usually, this equivalence process is obtained by using an orthogonal transformation. Not only voltages but also the total fluxes and eventually the currents must be established for the two resulted systems. The quantities of the unbalanced two-phase system can be written as follows:
E100
Further, the unbalanced quantities are transformed to balanced quantities and we obtain:
E101
The quantities of the three-phase system with
E102
and further:
E103
Modulus of these components can be determined at once with:
E104
For the transformation of the unbalanced two-phase quantities in balanced two-phase components (53) must be used:
E105
The matrix equation of the two-phase model is written in a convenient way hereinafter:
E106
Using elementary math (multiplications with constants, addition and subtraction of different equations) we can obtain the equations of the two-phase
E107
E108
We have defined the slip values for the direct (+) and respectively inverse (-) machines:
The two machine-models create self-contained torques, which act simultaneously upon rotor. The resultant torque emerges from superposition effects procedure (Simion et al., 2009; Simion & Livadaru, 2010). The equation set (59), for M2D, gives two equations:
E109
which give further
E110
Similarly, for M2I we obtain:
E111
E112
To determine the electromagnetic torque developed under unbalanced supply condition we use the symmetric components and the superposition effect. The
E113
Similarly, the expression of the
E114
The
E115
where we have defined the notations:
E116
Finally, the expression of the mean resultant torque with the slip is:
E117
The influence of the supply unbalances upon

Figure 7.
Te=f(s) characteristic for different unbalance degrees
Usually, the
E118
The curves A, B, C, and D from Fig. 7 correspond to the following values of the unbalance degree:
-
The second approach takes into consideration the following reasoning. When the amplitudes of the three-phase supply system and/or the angles of the phase difference are not equal to 2π/3 then the
unbalanced system can be replaced by twobalanced three-phase systems that act in opposition. One of them is thedirect sequence system and has higher voltages and the other is theinverse sequence system and has lower voltages. A transformation of the unbalanced voltages and total fluxes into two symmetric systems is again necessary. In other words, there is an unbalanced voltage system (U as , U bs , U cs ), which is replaced by thedirect andinverse symmetric systems. The mean resultant torque is the difference between the torques developed by the two symmetric machine-models. Taking into consideration their slip values (s d = s ands i = 2-s ) we can deduce the torque expression:
E119
E120
and this is the same with (69) as we expected.
Advertisement
6. Simulation study upon some transient duties of the three-phase induction machine
6.1. Symmetric supply system
The mathematical model described by the equation system (26-1…8) allows a complete simulation study of the operation of the three-phase induction machine, which include start-up, any sudden change of the load and braking to stop eventually. To this end, the machine parameters (resistances, main and leakage phase inductances, moments of inertia corresponding to the rotor and the load, coefficients that characterize the variable speed and torque, etc.) have to be calculated or experimentally deduced. At the same time, the values of the load torque and the expressions of the instantaneous voltages applied to each stator phase winding are known, as well. The rotor winding is considered short-circuited. Using the above mentioned equation system, the structural diagram in the Matlab-Simulink environment can be carried out. Additionally, for a complete evaluation, virtual oscillographs for the visualization of the main physical parameters such as voltage, current, magnetic flux, torque, speed, rotation angle and current or specific characteristics (mechanical characteristic, angular characteristic or flux hodographs) fill out the structural diagram.
The study of the
E121
E122
E123
E124
E125
E126
E127
E129
It has to be mentioned again that the above equation system allows the analysis of the three-phase induction machine under any condition, that is transients, steady state, symmetric or unbalanced, with one or both windings (from stator and rotor) connected to a supply system. Generally, a supplementary requirement upon the stator supply voltages is not mandatory. The case of short-circuited rotor winding, when the rotor supply voltages are zero, include the wound rotor machine under rated operation since the starting rheostat is short-circuited as well.
The presented simulation takes into discussion a varying duty, which consists in a
The

Figure 8.
Time variation of rotational pulsatance –

Figure 9.
Time variation of rotational pulsatance –
In the first moments of the start-up, the electromagnetic torque oscillates around 100 Nm and after the load torque enforcement, it gets to approx. 53 Nm for
The behavior of the machine is very interesting described by the hodograph of the resultant rotor flux (the locus of the head of the resultant rotor flux phasor), Fig. 12 and 13. With the connecting moment, the rotor fluxes start from 0 (O points on the hodograph) and track a corkscrew to the maximum value that corresponds to synchronism (ideal no-load operation), S points on the hodographs.

Figure 10.
Time variation of electromagnetic torque –

Figure 11.
Time variation of electromagnetic torque –

Figure 12.
Hodograph of resultant rotor flux –

Figure 13.
Hodograph of resultant rotor flux –
The enforcement of the load torque determines a decrease of the resultant rotor flux, which is proportional to the load degree, and is due to the rotor reaction. The locus of the head of the phasor becomes a circle whose radius is proportional to the amplitude of the resultant rotor flux. The speed on this circle is given by the rotor frequency that is by the slip value. It is interesting to notice that the load torque of 50 Nm causes a unique rotation of the rotor flux whose amplitude becomes equal to the segment ON (Fig. 12) whereas the 120 Nm torque causes approx. 4 rotations of the rotor flux and the amplitude OF is significantly smaller (Fig. 13).
If the expressions (1) and (2) are also used in the structural diagram then both stator and rotor phase currents can be plotted. The stator current corresponding to

Figure 14.
Time variation of stator phase current –

Figure 15.
Time variation of rotor phase current –

Figure 16.
Time variation of rotational pulsatance –

Figure 17.
Time variation of electromagnetic torque –
The third simulation,
The described critical duty that involves no-load start-up and operation, overloading, falling out and stop is plotted in terms of resultant rotor flux and angular speed versus electromagnetic torque. The hodograph (Fig. 18) put in view a cuasi corkscrew section, corresponding to the start-up, characterized by its maximum value represented by the segment OS. The falling out tracks the corkscrew SP with a decrease of the amplitude, which is proportional to the deceleration of the rotor. The point P corresponds to the locked-rotor position (s=1). Fig. 19 presents the dynamic mechanical characteristic, which shows the variation of the electromagnetic torque under variable operation condition. During the no-load start-up, the operation point tracks successively the points O, M, L and S, that is from locked-rotor to synchronism with an oscillation of the electromagnetic torque inside certain limits (≈+200Nm to ≈-25Nm). The enforcement of the overload torque leads the operation point along the

Figure 18.
Hodograph of resultant rotor flux –

Figure 19.
Rotational pulsatance vs. torque –
6.2. Asymmetric supply system
A simulation study of the three-phase induction machine under unbalanced supply condition and varying duty (start-up, sudden torque enforcement and braking to stop eventually) is possible by using the same mathematical model described by the equation system (26-1…8). The values of the resistant torques and the expressions of the instantaneous phase voltages have to be stated. Since the rotor winding is short-circuited, the supply rotor voltages are uar=ubr=ucr=0. On this basis, the structural diagram has been put into effect in the Matlab-Simulink environment. As regards the unbalanced three-phase supply system, it has to be mentioned that the phase voltages are no more equal in amplitude and the angles of phase difference may have other values than 2π/3 rad. In any event, the sum of the instantaneous values of the applied voltages must be zero, that is uas+ubs+ucs=0. As an argument for this seemingly constraint stands the fact that the vast majority of the three-phase induction machines are connected to the industrial system via three supply leads (no neutral).
The simulation presented here takes into discussion an induction machine with the same parameters as above that is: Rs=Rr=2; Lhs=0,09; Lσs= Lσr=0,01; J=0,05; p=2; kz=0,02; ω1=314,1 (SI units). Consequently, the equations (73-1) - (73-8) keep unchanged. The expressions (73-9) have to be modified in accordance with the asymmetry degree.
Two varying duties under unbalanced condition have been simulated. The first (denoted
E130
The simulation results are presented in Fig. 20, 22, 24, 25 and 28. The second study simulation (denoted
E131
The simulation results are presented in Fig. 21, 23, 26, 27 and 29. The varying duties are similar to those discussed above and consist in a
In comparison to symmetric supply, the unbalanced voltage system causes a longer start-up time with approx. 20% for

Figure 20.
Time variation of rotational pulsatance –

Figure 21.
Time variation of rotational pulsatance –
The inspection of the electromagnetic torque variation (Fig. 22 and 23) shows the presence of a variable oscillating torque, whose frequency is twice the supply voltage frequency (in our case 100 Hz) and overlaps the average torque.

Figure 22.
Time variation of electromagnetic torque –

Figure 23.
Time variation of electromagnetic torque –

Figure 24.
Time variation of stator phase current –

Figure 25.
Time variation of rotor phase current –

Figure 26.
Time variation of stator phase current –

Figure 27.
Time variation of rotor phase current –
The stator currents variation, Fig. 24 and 26, have a sinusoidal shape and an unmodified frequency of 50 Hz. Their amplitude increases however with the asymmetry degree (approx. 18 A for

Figure 28.
Hodograph of resultant rotor flux –

Figure 29.
Hodograph of resultant rotor flux –
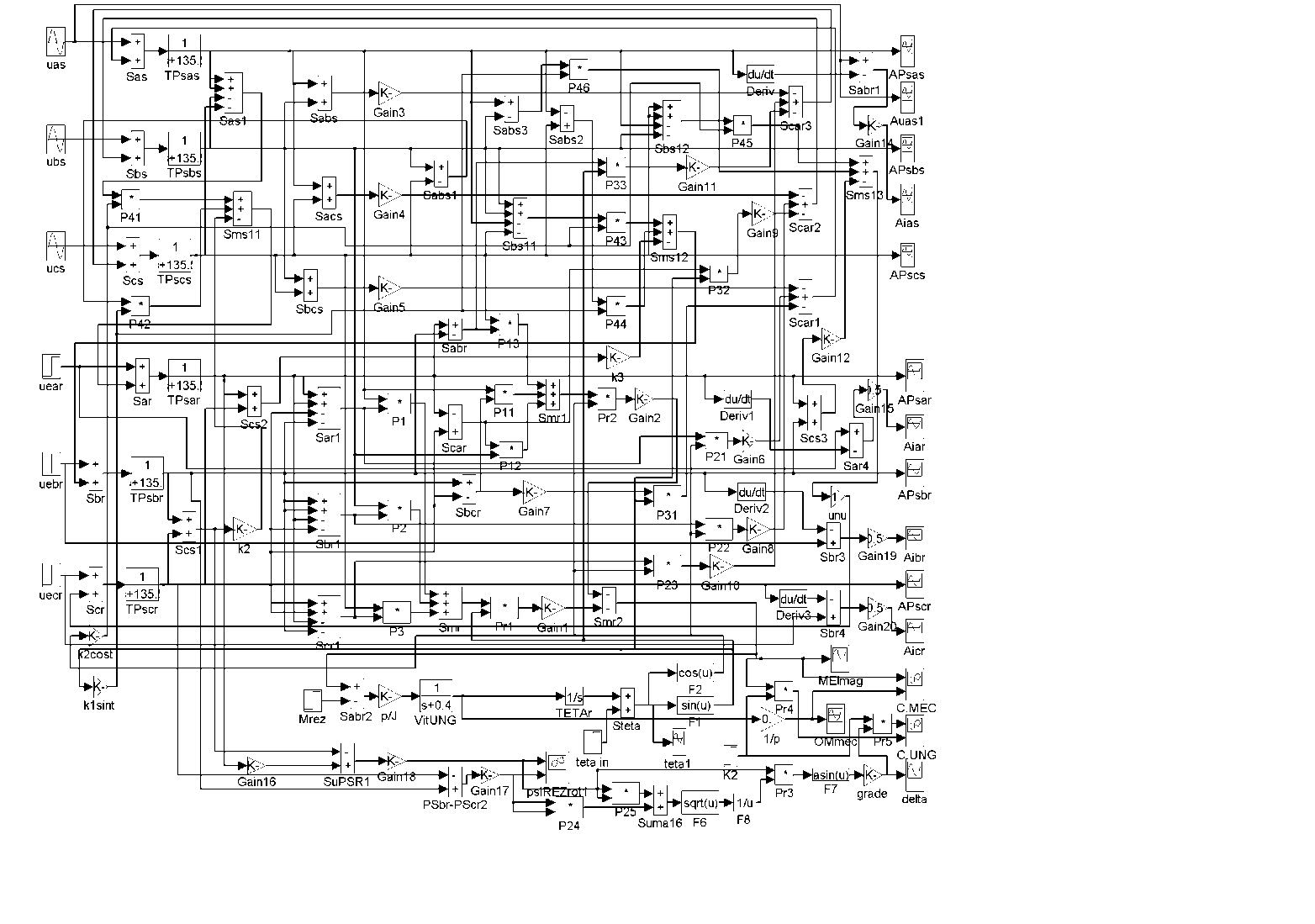
Figure 30.
Structural diagram of the three-phase induction machine
The hodographs of the resultant rotor flux show a very interesting behavior of the unbalanced machines, Fig. 28 and 29. In comparison to the symmetric supply cases where the hodograph is a circle under steady state, the asymmetric system distort the curve into a „gear wheel" with a lot of teeth placed on a mean diameter whose magnitude depends inverse proportionally with the asymmetry degree. Generally, these curves do not overlap and prove that during the operation the interaction between stator and rotor fluxes is not constant in time since the rotor speed is not constant. Consequently, the rotor vibrations are usually propagated to the mechanical components and working machine.
In order to point out the superiority of the proposed mathematical model, Fig. 30 shows the structural diagram used in Simulink environment. The diagram is capable to simulate any steady-state and transient duty under balanced or unbalanced state of the induction machine including doubly-fed operation as generator or motor by simple modification of the input data. To prove this statement, a simulation of an unbalanced doubly-fed operation has been performed. The operation cycle involves: I. A no-load start-up (the wound rotor winding is short-circuited); II. Application of a supplementary output torque of (-70) Nm (at the moment t=0.4 sec.) which leads the induction machine to the generating duty (over synchronous speed); III. Supply of two series connected rotor phases with d.c. current (Uar=+40V, Ubr= −40V, Ucr=0V), at the moment time t=0.6 sec., which change the operation of the induction generator into a synchronized induction generator (SIG).
Fig. 31 and 32 show the dynamic mechanical characteristic, Te=f(ΩR) and the hodograph of the resultant rotor flux respectively. The start-up corresponds to A-S1 curve, the over synchronous acceleration is modeled by S1-S curve and the operation under SIG duty corresponds to S-S2 curve. A few observations regarding Fig. 32 are necessary as well. The rotor flux hodograph is rotating in a

Figure 31.
Dynamic mechanical characteristic

Figure 32.
Hodograph of resultant rotor flux
Advertisement
7. Conclusion
The mathematical model presented in this contribution is characterized by the total lack of the winding currents and angular speed in the voltage equations. Since these parameters are differential quantities of other electric parameters, they usually bring supplementary calculus errors mainly for the dynamic duty analysis. Their removal assures a high accuracy of the results. If their variation is however necessary to be known then simple subsequent calculations can be performed.
The use of the mathematical model in total fluxes is appropriate for the study of the electric machines with permanent magnets where the definitive parameter is the magnetic flux and not the electric current.
The coefficients defined by (28.1-4), which depend on resistances and inductances, take into consideration the saturation. Consequently, the study of the induction machine covers more than the linear behavior of the magnetization phenomenon.
The most important advantage of the proposed mathematical model is its generality degree. Any operation duty, such as steady-state or transients, balanced or unbalanced, can be analyzed. In particular, the double feeding duty and the synchronized induction machine operation (feeding with D.C. current of a rotor phase while the other two are short-circuited) can be simulated as well.
The results obtained by simulation are based on the transformation of the equations in structural diagrams under Matlab-Simulink environment. They present the variation of electrical quantities (voltages and currents corresponding to stator and rotor windings), of mechanical quantities (expressed through rotational pulsatance) and of magnetic parameters (electromagnetic torque, resultant rotor and stator fluxes). They put in view the behavior of the induction machine for different transient duties. In particular, they prove that any unbalance of the supply system generates important variations of the electromagnetic torque and rotor speed. This fact causes vibrations and noise.
© 2012 The Author(s). Licensee IntechOpen. This chapter is distributed under the terms of the Creative Commons Attribution 3.0 License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
How to cite and reference
chapter statistics
6267 total chapter downloads
3 Crossref citations
More statistics for editors and authors
Login to your personal dashboard for more detailed statistics on your publications.
Access personal reporting
Related Content
This Book
Next chapter
The Behavior in Stationary Regime of an Induction Motor Powered by Static Frequency Converters
By Sorin Muşuroi
Related Book
Modelling and Control of Switched Reluctance Machines
Edited by Rui Araújo
First chapter
Modeling and Simulation of Switched Reluctance Machines
By Mahmoud Hamouda and László Számel
We are IntechOpen, the world's leading publisher of Open Access books. Built by scientists, for scientists. Our readership spans scientists, professors, researchers, librarians, and students, as well as business professionals. We share our knowledge and peer-reveiwed research papers with libraries, scientific and engineering societies, and also work with corporate R&D departments and government entities.
More About Us
Mathematical Model Of Induction Motor Pdf
Source: https://www.intechopen.com/chapters/40917
Posted by: hatchhadmingesen.blogspot.com
0 Response to "Mathematical Model Of Induction Motor Pdf"
Post a Comment